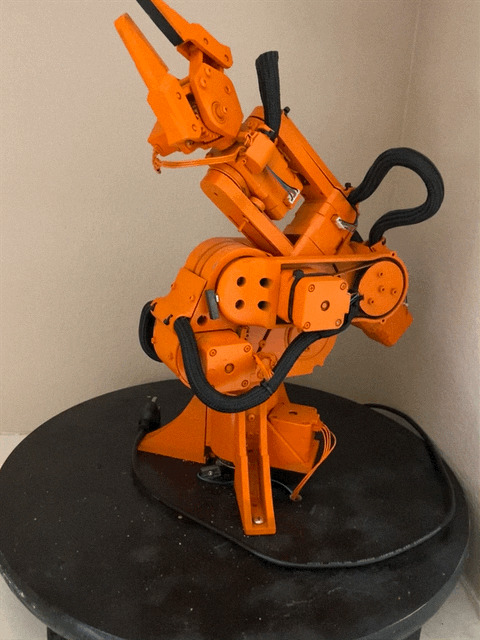
Robot Arm V1

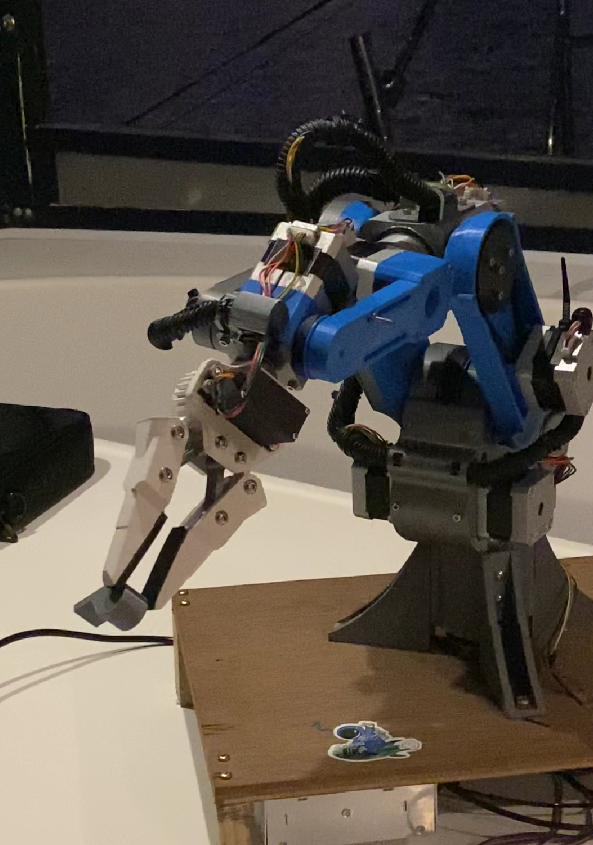
I began this project at age 15, leveraging my knowledge of 3D printers to design a six-axis robotic arm for under $200. Initially, I experimented with servo motors but switched to stepper motors for better performance. I designed it from the top down and got it operational, incorporating limit switches and homing for positional awareness. By age 16, it was fully functional. I used an ESP32 as the main processor and wrote all the code in MicroPython. I also developed a Python GUI application to control it, allowing users to simulate movements in 3D via software before sending commands over Wi-Fi to the robot. It reliably moved pieces on a chessboard. This was an excellent learning experience, but it revealed design flaws that I addressed in V2.
The arm's structure was primarily 3D-printed, with custom linkages for smooth motion. Challenges included vibration control and power management, solved through better gearing and efficient drivers.