ROV for Neuromorphic Camera Research
I am currently leading a research team to develop a Remotely Operated Vehicle (ROV) for future research involving neuromorphic cameras. This design is entirely my own and unlike any other available.
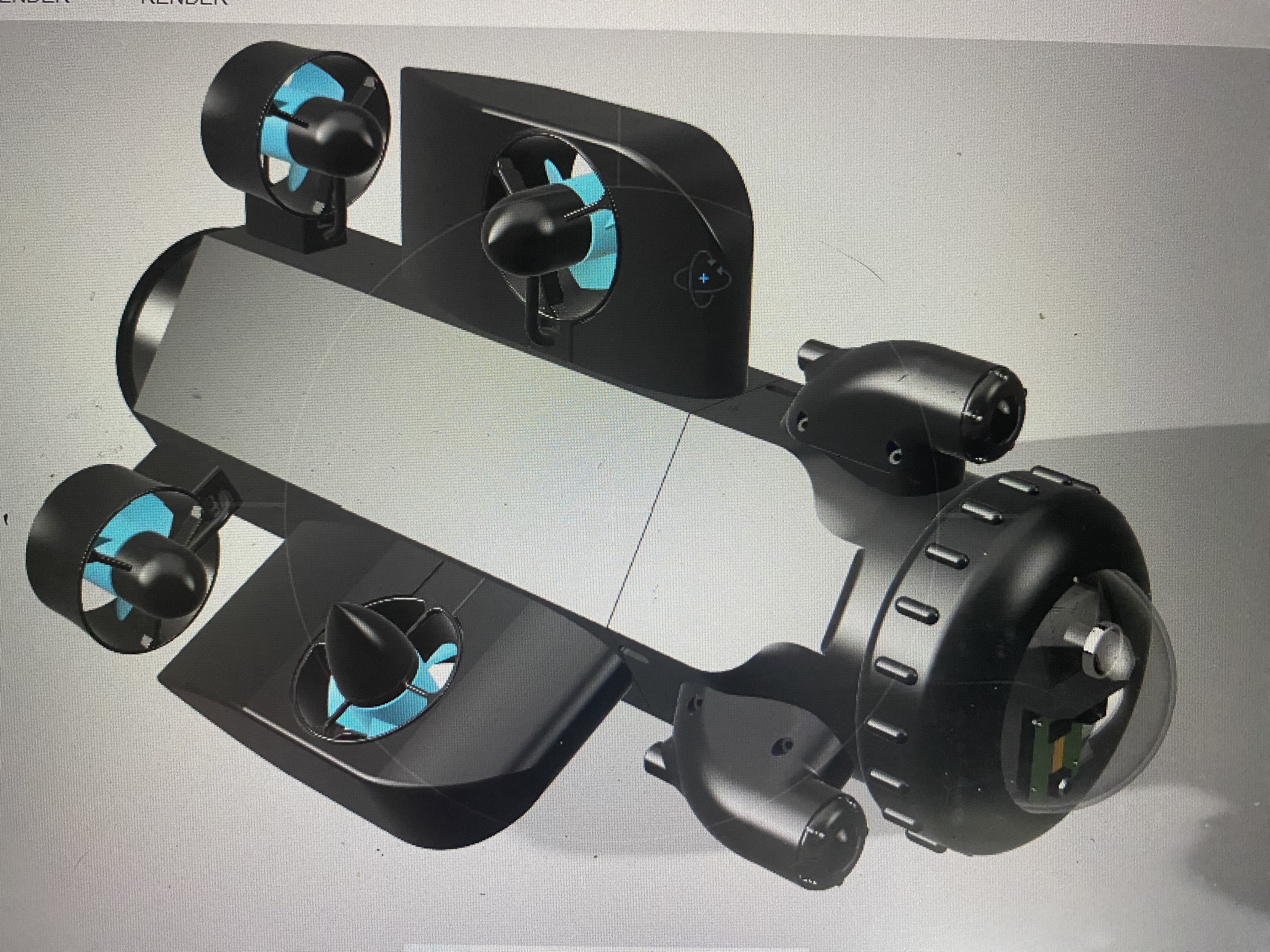
Typically, achieving six degrees of freedom—the maximum range of control—requires at least eight thrusters, but this design accomplishes it with only six. It also features three thrusters oriented in the hydrodynamic direction, making it the most efficient configuration.
The total forward thrust is 3.6 kg of force, paired with a streamlined hydrodynamic design that should enable high speeds. The total power consumption is a substantial 1,152 watts.
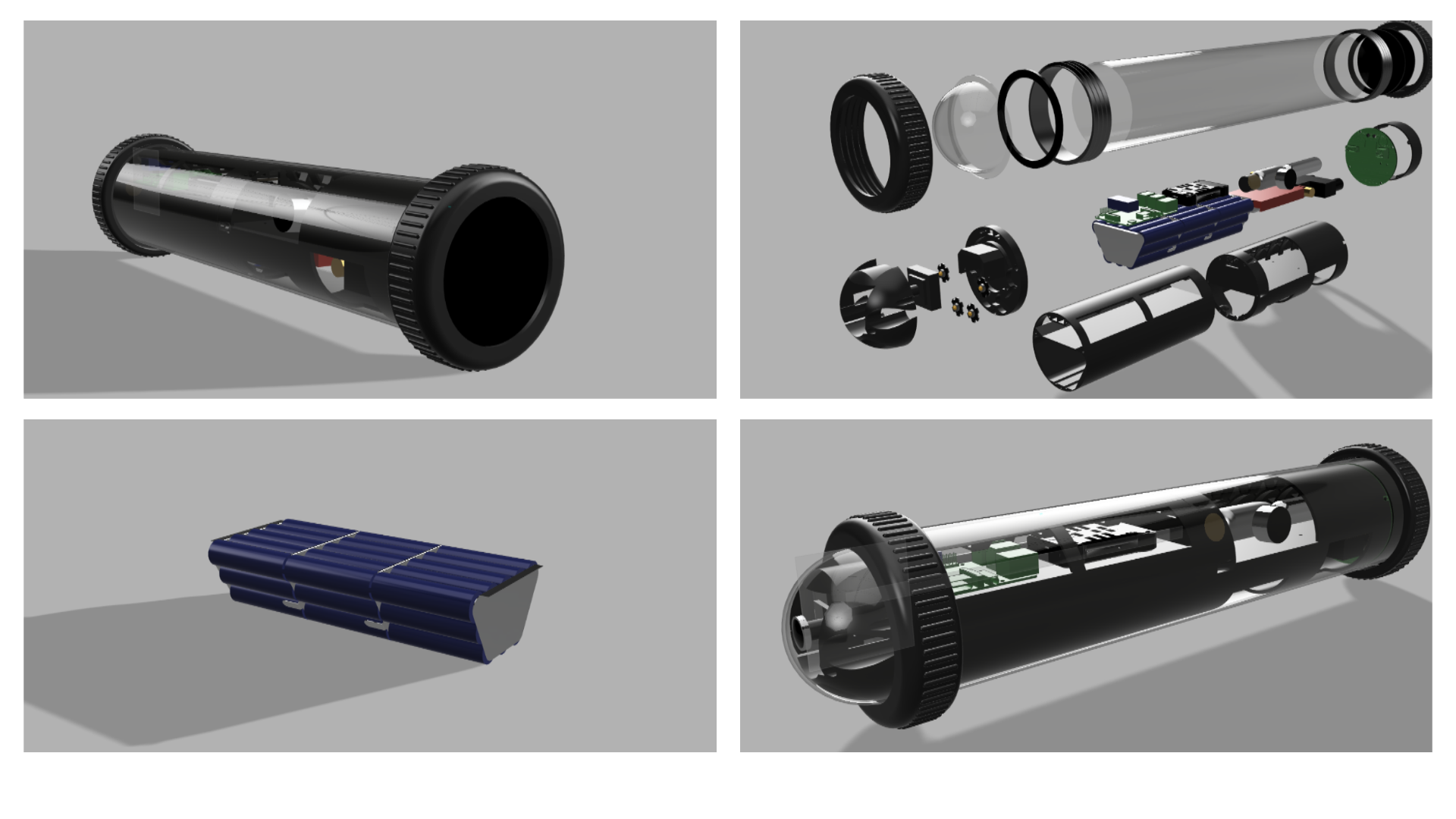
I designed the electrical components to be completely removable, including a detachable battery and Battery Management System (BMS) unit. At maximum power—with all six motors and electronics operating simultaneously—the battery should last 28 minutes, though realistically longer under normal circumstances. The was designed to use nickel sheets cut to shape and spot-welded.
The ROV is still in the design phase, but the design has been approved and is ready to be built.