Servo Stepper Project
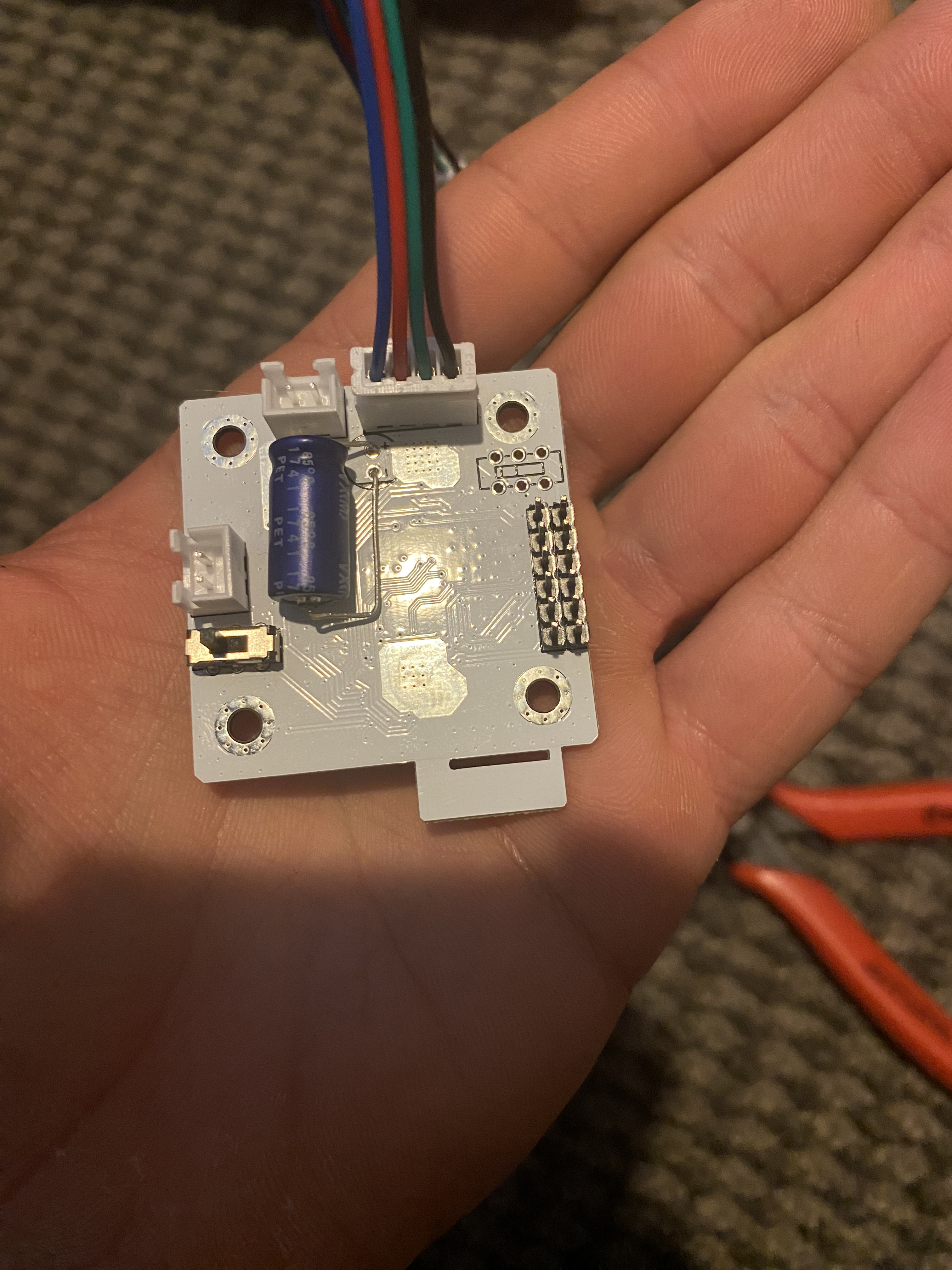
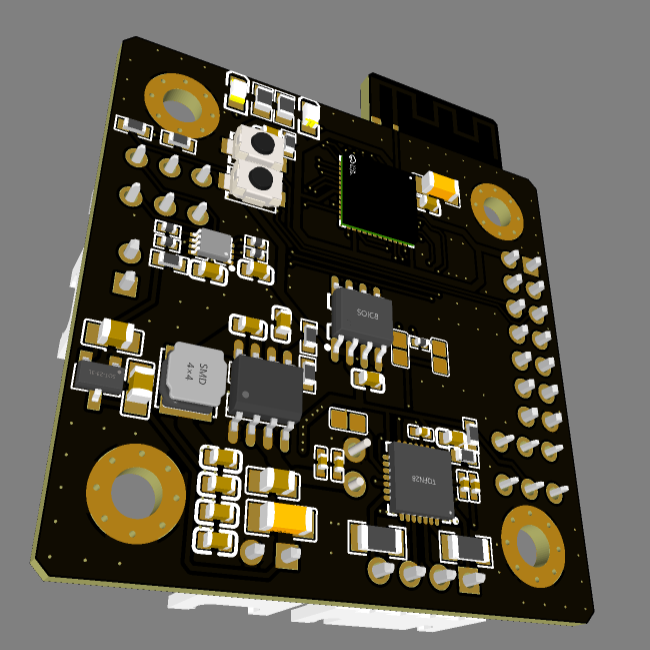
I aimed to create an affordable closed-loop system for stepper motors with built-in acceleration calculations and driving capabilities. It needed to support daisy-chaining to minimize wires to just four for an entire robot. I paired a magnetic encoder IC with a stepper motor IC and an ESP32 chip, fitting everything onto a compact PCB that screws into the motor's back. I ordered the PCBs and began programming, but it took two iterations to perfect. The first had routing mismatches, but I modified it to work. Programmed in MicroPython, it handled smooth acceleration and deceleration. If steps were skipped by force, it automatically readjusted with precise acceleration control that PID tuning couldn't match.
The design enabled efficient multi-motor control in robotics.